Collaborative GAN for Missing Image Data Imputation(论文解读)
在同一域下的图像和数据是符合一个整体流形分布的,一旦域中的数据缺失,能否利用已有的域中数据去还原丢失的数据呢?Collaborative GAN提出了一种新的缺失图像数据插补框架,称为协同生成对抗网络(CollaGAN)。CollaGAN是在现在已经成熟的单图像到图像生成的基础上,研究多域图像到图像的翻译任务,以便单个生成器和判别器网络可以使用剩余的干净数据集成功估计丢失的数据。
论文引入
无论是人眼还是摄像头都不可能实现单采样下全视角的视角采集,往往一个物体的描述需要多视角的结合才能得到完整的性质描述。所以一个完整的数据在实现视觉分析起到很重要的作用,例如在从多个视图相机图像生成三维体积时,大多数算法都需要预先定义视角集,可是由于采集成本和时间,数据集中的(系统)错误等,通常很难获得完整的输入数据集。
估算缺失数据对于物体建模和分析影响很大,有几种标准方法可以根据整组的建模假设来估算缺失数据,如均值插补,回归插补,随机插补等[1]。然而,这些标准算法对诸如图像这类高维数据具有限制,因为图像插补需要知道高维图像数据流形。图像到图像翻译试图解决高维图像的缺失修复,诸如超分辨率、去噪、去模糊、风格迁移、语义分割、深度预测等任务可被视为将图像从一个域映射到另一个域中的对应图像。
图像翻译的高质量决定着缺失模态估算的准确性,生成对抗网络(GAN)的提出大大改善了图像翻译的实现任务。已经很熟悉的模型有CycleGAN、DiscoGAN、UNIT,这一类实现了两个域之间的单图像到单图像的转换。StarGAN[2]和MUNIT[3]则可以实现单个生成器学习多个域之间的转换映射,这就是单张图像转换到多张图像。这些基于GAN的图像传输技术与图像数据插补密切相关,因为图像翻译可以被认为是通过对图像流形结构建模来估计丢失图像数据库的过程。然而,图像插补和图像转换之间存在根本差异。例如,CycleGAN和StarGAN有兴趣将一个图像转移到另一个图像,但不考虑剩余的域数据集。然而,在图像插补问题中,丢失的数据不经常发生,并且目标是通过利用其他清洁数据集来估计丢失的数据。
因此Collaborative GAN通过设计一个生成器去使用剩余的有效数据集来估计丢失的数据。由于丢失的数据域不难以估计先验,因此应该设计插补算法,使得一种算法可以通过利用其余域的数据来估计任何域中的丢失数据。这一过程和之前所提模型的区别可由下图展示:
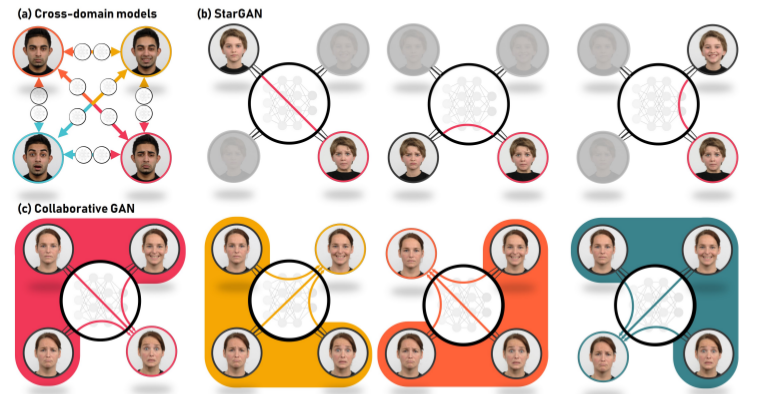
上图(a)可以表示单图到单图的模型,代表由CycleGAN;(b)图为StarGAN转换图示,它是由原输入去转换成对应标签的图像;(c)则是利用除目标域图像外的其余图像一起作用生成目标标签图像。总结一下协同生成对抗网络(CollaGAN)的优点:
- 可以从共享相同流形结构的多输入数据集而不是单个输入中更加协同地学习基础图像流形,达到更准确估计丢失数据。
- CollaGAN保留了StarGAN类似的单生成器架构,与CycleGAN相比,它具有更高的内存效率。
模型实现
首先贴上CollaGAN的模型实现框图:
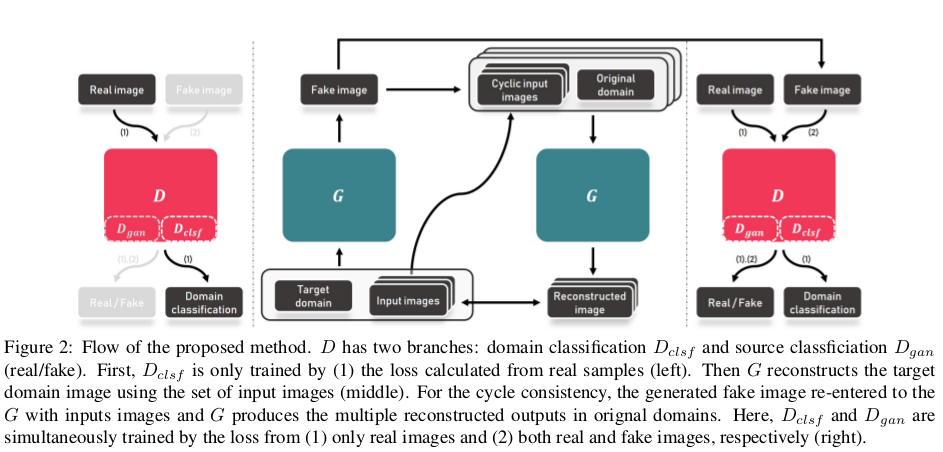
这个图咋一看有些抽象,我们待会再详细分析,先把涉及到的参量做个定义。原文为了便于解释,假设域中含有4类样本:a、b、c、d。比如,生成器为了生成域a的样本,则生成器则会参考图像域b、c、d,将b、c、d协同送入生成器获得图像集$\lbrace x_a \rbrace^C = \lbrace x_b, x_c, x_d \rbrace$。其中上标C表示补充集,完整表示为:
\[\hat{x}_k = G(\lbrace x_k \rbrace^C;k)\]其中$k \in \lbrace a,b,c,d \rbrace$表示目标域索引,用于指导生成适当目标域的输出κ。由于存在多个输入和单输出组合的N个组合,在训练期间随机选择这些组合,以便生成器学习到多个目标域的各种映射。
我们来分析一下如何实现CollaGAN,类似于StarGAN,判别器的作用有两个,一个是实现对生成图像判断真假,另一个是实现域分类作用,确定图像是来自哪一个域。判别器的分类和判断只在最后一层分出,其余网络部分均共享参数,模型框图的最左侧就是预训练判别器的分类参数。通过固定网络的其余部分只对判别器实现图像域分类做优化,这一实现可以通过仅送入真实域图像下利用交叉熵损失实现:
\[\mathcal L_{clsf}^{real}(D_{clsf}) = \mathbb E_{x_k}[-log(D_{clsf}(k;x_k))]\]其中$D_{clsf}(k;x_k)$可以解释为将实际输入$x_k$正确分类为类$κ$的概率。
训练好判别器的分类就可以对模型的正式部分进行训练,对于生成器G(图中的中间部分)输入的是要生成目标域的类别标签Target Domain,和其余域类的协同输入Input Image,经过生成器得到目标域图像Fake Image,为了实现循环一致的思想,用生成的Target Image作为协同输入的一部分去生成其余的域图像。对于a、b、c、d的4类输入下,假设目标域是a,这个循环思想的思想就要再重构其余3类:
\[\tilde{x}_{b \vert a} = G(\lbrace \hat{x}_a,x_c,x_b \rbrace;b)\] \[\tilde{x}_{c \vert a} = G(\lbrace \hat{x}_a,x_b,x_d \rbrace;c)\] \[\tilde{x}_{d \vert a} = G(\lbrace \hat{x}_a,x_b,x_c \rbrace;d)\]优化循环一致损失为:
\[\mathcal L_{mcc,a} = \Vert x_b - \tilde{x}_{b \vert a} \Vert_1 + \Vert x_c - \tilde{x}_{c \vert a} \Vert_1 + \Vert x_d - \tilde{x}_{d \vert a} \Vert_1\]这里的$\Vert \cdot \Vert$表示的是$L_1$损失,这个循环一致的推广到各类域可进一步表示为:
\[\mathcal L_{mcc,k} = \sum_{k' \neq k} \Vert x_k' - \tilde{x}_{k' \vert k} \Vert_1\]此时:
\[\tilde{x}_{k' \vert k} = G(\lbrace \hat{x}_k \rbrace^C;k')\]模型框图的最右侧就是训练中判别器的,判别器在训练阶段除了分清图片的真假还有就是通过分类器去优化生成器网络。我们解释下怎么通过分类去优化生成器,通过训练发生器G以产生由$D_{clsf}$正确分类的假样本。因此,对于G,在优化生成域分类当最小化损失:
\[\mathcal L_{clsf}^{fake}(G) = \mathbb E_{\tilde{x}_{k' \vert k}}[-log(D_{clsf}(k;\tilde{x}_{k' \vert k}))]\]至于生成对抗损失,文章采用的是较为稳定的LSGAN:
\[\mathcal L_{gan}^{dsc}(D_{gan}) = \mathbb E_{x_k}[(D_{gan}(x_k)-1)^2] + \mathbb E_{\tilde{x}_{k' \vert k}}[(D_{gan}(\tilde{x}_{k' \vert k}))^2]\] \[\mathcal L_{gan}^{gen}(G) = \mathbb E_{\tilde{x}_{k' \vert k}}[(D_{gan}(\tilde{x}_{k' \vert k}) - 1)^2]\]域标签的嵌入采用经典的one-hot形式。
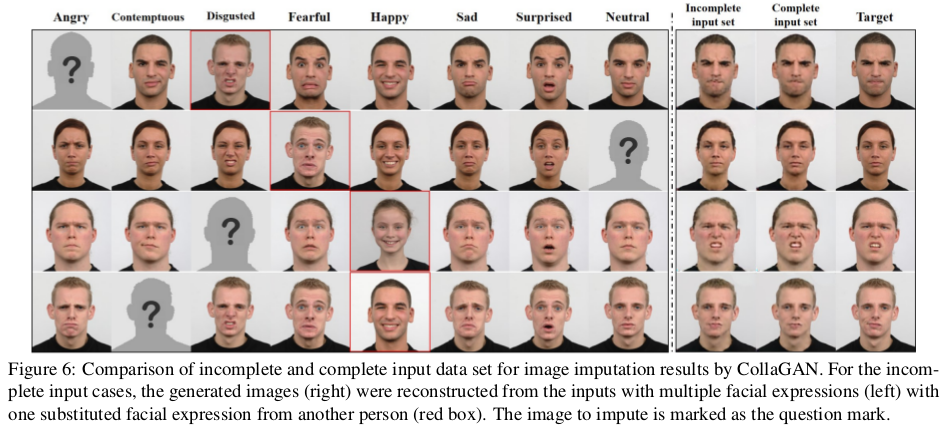
这里提一下如何实现生成器输入端的协同输入,这个的实现在文章中是根据不同的数据集采取的方式是不同的,对于面部表情数据集RaFD下八个面部表情,对生成器重新设计有八个编码器分支,并且在生成器的中间阶段的编码处理之后将它们连接起来。生成器的架构是包含编码解码过程的,整体采用U-Net实现,判别器采用PatchGAN的设计思路。
实验
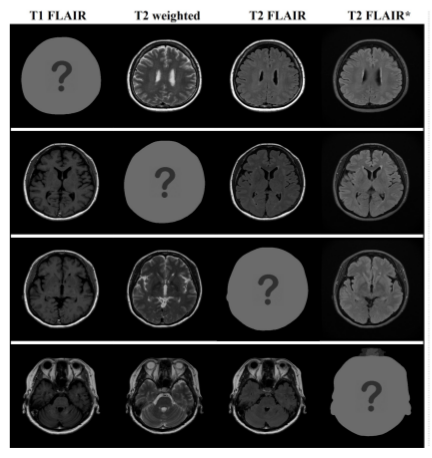
文章主要在三个数据集下进行实验测试,MR contrast synthesis数据集是通过多动态多回波序列和来自10个受试者的附加T2 FLAIR(流体衰减反转恢复)序列扫描总共280个轴脑图像。在数据集中有四种类型的MR对比图像:T1-FLAIR (T1F),T2-weighted(T2w),T2-FLAIR (T2F)和 T2-FLAIR* (T2F*)。前三个对比度是从磁共振图像编译(MAGiC,GE Healthcare)获得的,T2-FLAIR *是通过第三对比度(T2F)的不同MR扫描参数的附加扫描获得的。MR contrast synthesis数据集也是作者进行本次研究的目的性数据集。
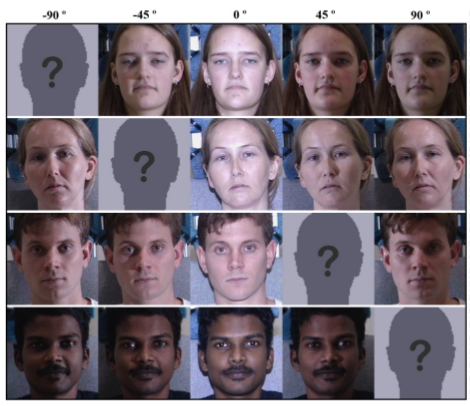
CMU Multi-PIE数据集使用了Carnegie Mellon Univesity多姿态照明和表情面部数据库的子集,250名参与者,并且在以下五种照明条件下选择中性表情的正面:-90°(右), - 45°,0°(前),45°和90°(左),并将图像裁剪为240×240,其中面部居中。对于此数据集的实验上,使用YCbCr颜色编码代替RGB颜色编码。YCbCr编码由Y亮度和CbCr色空间组成。在五种不同的照明图像,它们几乎共享CbCr编码,唯一的区别是Y-亮度通道。因此,处理唯一的Y亮度通道用于照明转换任务,然后重建的图像转换为RGB编码图像。
Radboud Faces数据集(RaFD)包含从67名参与者收集的八种不同的面部表情;中立,愤怒,轻蔑,厌恶,恐惧,快乐,悲伤和惊讶(这个数据集在StarGAN中也被使用)。此外,有三个不同的凝视方向,总共1,608个图像,并将图像裁剪为640×640并将resize为128×128。
在MR的数据集上,实验对比了CycleGAN、StarGAN和CollaGAN:
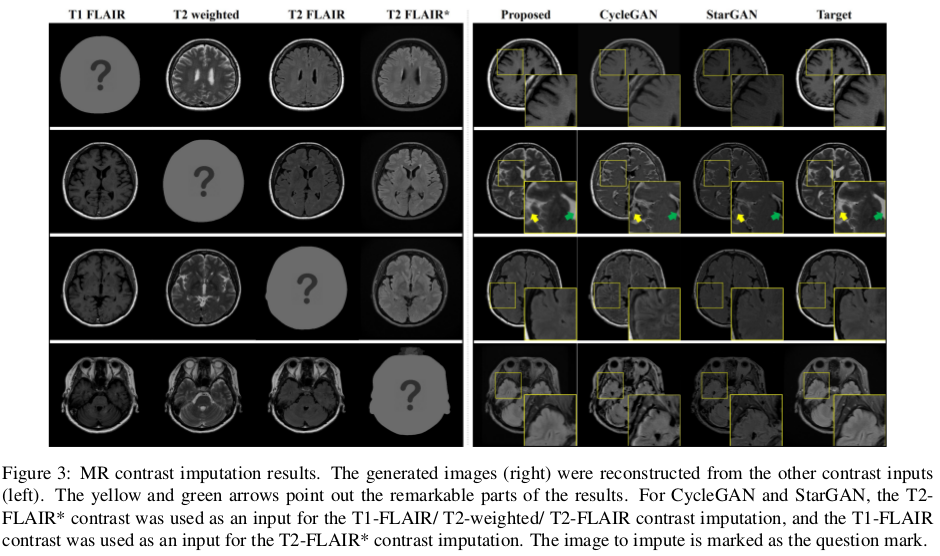
从医学分析上T2-weighted图像中的脑脊液(CSF)应该是明亮的,上图中的第二行结果,这个在CollaGAN上效果最佳,在StarGAN和CycleGAN上则是暗淡的,在另外两个数据集下的定性测试上,CollaGAN也展示优势:
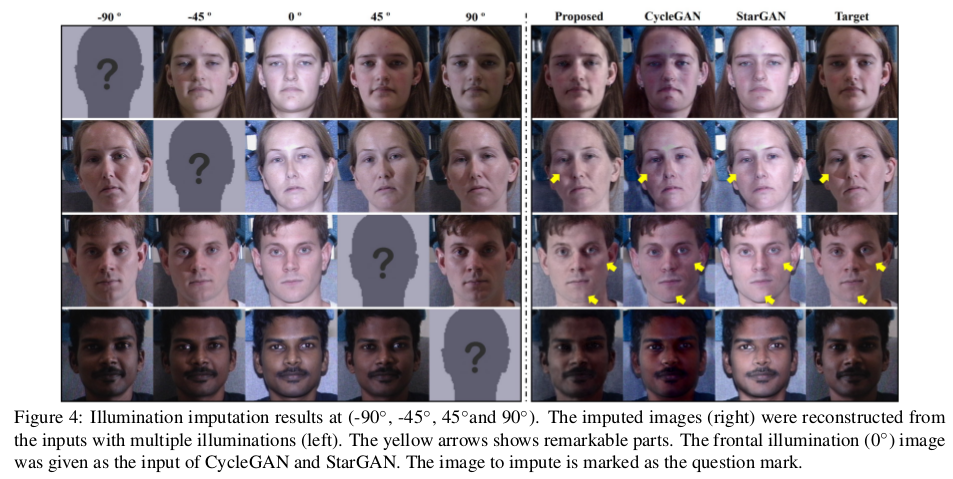
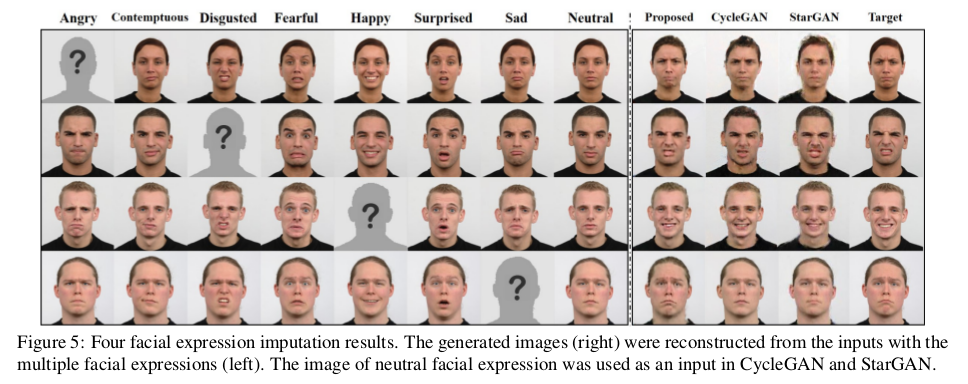
文章还对不同域下的图像弥补缺失输入下进行了测试,得到的结果依旧是正向的:
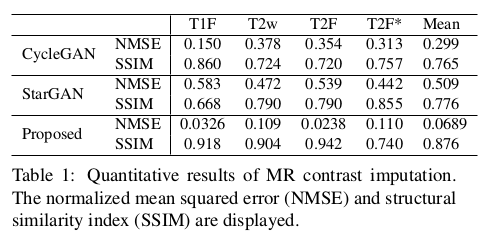
在定量分析上,作者采用重建和目标之间计算归一化均方误差(NMSE)和结构相似性指数(SSIM)来衡量,文章还花了一定篇幅介绍了SSIM的度量计算公式(感兴趣的可以自行阅读原文)。在定量上对比CycleGAN和StarGAN得到了优异的效果。
总结
CollaGAN通过在单个发生器和判别器的帮助下协同组合来自可用数据的信息,提出了一种新颖的CollaGAN架构,用于丢失图像数据插补。与现有方法相比,所提出的方法产生了更高视觉质量的图像。
CollaGAN的创新在于生成器的多输入下生成域中缺失信息,这个想法是以往模型中没有的,同时利用多域下的有效信息去恢复缺失信息也很符合人类的思考方式。
参考文献
[1] A. N. Baraldi and C. K. Enders. An introduction to modern missing data analyses. Journal of school psychology,48(1):5–37, 2010.
[2] Y. Choi, M. Choi, M. Kim, J.-W. Ha, S. Kim, and J. Choo.StarGAN: Unified generative adversarial networks for multi-domain image-to-image translation. arXiv preprint, 1711,2017.
[3] Huang X, Liu M, Belongie S J, et al. Multimodal Unsupervised Image-to-Image Translation[J]. european conference on computer vision, 2018: 179-196.

感谢您的支持,我会继续努力的!


打开微信扫一扫,即可进行扫码打赏哦