Faster R-CNN简析(基本上都是引用)
既然前面说了RCNN和Fast-RCNN了,今天我们来看看可以做到实时显示目标检测的方法Faster-RCNN,本篇博文主要来自这里
一、基础引入
在之前介绍的Fast-R-CNN中,第一步需要先使用Selective Search方法提取图像中的proposals。基于CPU实现的Selective Search提取一幅图像的所有Proposals需要约2s的时间。 在不计入proposal提取情况下,Fast-R-CNN基本可以实时进行目标检测。但是,如果从端到端的角度考虑,显然proposal提取成为影响端到端算法性能的瓶颈。 目前最新的EdgeBoxes算法虽然在一定程度提高了候选框提取的准确率和效率,但是处理一幅图像仍然需要0.2s。因此,Ren Shaoqing提出新的Faster-R-CNN算法,该 算法引入了RPN网络(Region Proposal Network)提取proposals。RPN网络是一个全卷积神经网络,通过共享卷积层特征可以实现proposal的提取, RPN提取一幅像的proposal只需要10ms.
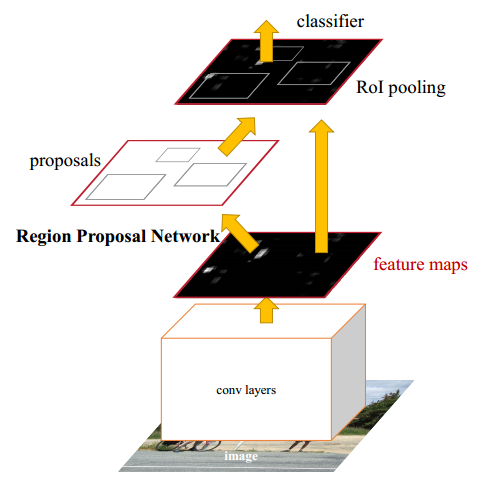
Faster-R-CNN算法由两大模块组成:1.PRN候选框提取模块 2.Fast R-CNN检测模块。其中,RPN是全卷积神经网络,用于提取候选框; Fast R-CNN基于RPN提取的proposal检测并识别proposal中的目标。
二、Region Proposal Network (RPN)
RPN网络的输入可以是任意大小(但还是有最小分辨率要求的,例如VGG是228*228)的图片。如果用VGG16进行特征提取,那么RPN网络的组成形式可以表示为VGG16+RPN。
VGG16:可以参考这里, 可以看出VGG16中用于特征提取的部分是13个卷积层(conv1_1—->conv5.3),不包括pool5及pool5后的网络层次结构。
RPN:RPN是作者重点介绍的一种网络,如下图所示。RPN的实现方式:在conv5-3的卷积feature map上用一个nxn的滑窗(论文中作者选用了n=3,即3x3的滑窗) 生成一个长度为256(对应于ZF网络)或512(对应于VGG网络)维长度的全连接特征。然后在这个256维或512维的特征后产生两个分支的全连接层:
1.reg-layer,用于预测proposal的中心锚点对应的proposal的坐标x,y和宽高w,h;
2.cls-layer,用于判定该proposal是前景还是背景。sliding window的处理方式保证reg-layer和cls-layer关联了conv5-3的全部特征空间。
事实上,作者用全连接层实现方式介绍RPN层实现容易帮助我们理解这一过程,但在实现时作者选用了卷积层实现全连接层的功能。个人理解:全连接层本来就是特殊的卷积层, 如果产生256或512维的fc特征,事实上可以用Num_out=256或512, kernel_size=3x3, stride=1的卷积层实现conv5-3到第一个全连接特征的映射。 然后再用两个Num_out分别为2x9=18和4x9=36,kernel_size=1x1,stride=1的卷积层实现上一层特征到两个分支cls层和reg层的特征映射。 注意:这里2x9中的2指cls层的分类结果包括前后背景两类,4x9的4表示一个Proposal的中心点坐标x,y和宽高w,h四个参数。 采用卷积的方式实现全连接处理并不会减少参数的数量,但是使得输入图像的尺寸可以更加灵活。在RPN网络中,我们需要重点理解其中的anchors概念, Loss fucntions计算方式和RPN层训练数据生成的具体细节。
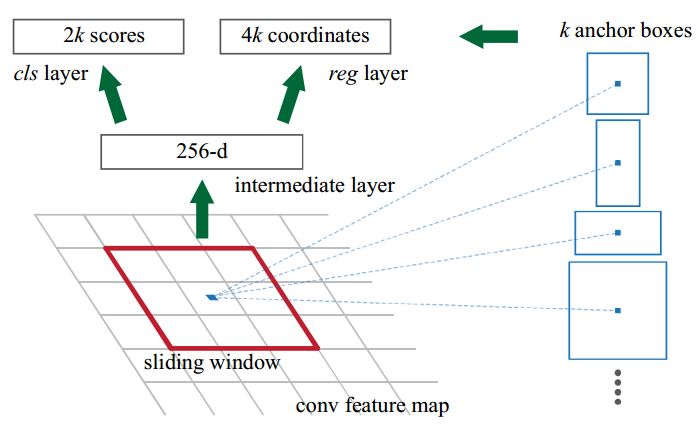
Anchors:字面上可以理解为锚点,位于之前提到的nxn的sliding window的中心处。对于一个sliding window,我们可以同时预测多个proposal, 假定有k个。k个proposal即k个reference boxes,每一个reference box又可以用一个scale,一个aspect_ratio和sliding window中的锚点唯一确定。 所以,我们在后面说一个anchor,你就理解成一个anchor box 或一个reference box.作者在论文中定义k=9, 即3种scales和3种aspect_ratio确定出当前sliding window位置处对应的9个reference boxes, 4xk个reg-layer的输出和2xk个cls-layer的score输出。 对于一幅WxH的feature map,对应WxHxk个锚点。所有的锚点都具有尺度不变性。
Loss functions:在计算Loss值之前,作者设置了anchors的标定方法。正样本标定规则:
1.如果Anchor对应的reference box与ground truth的IoU值最大,标记为正样本;
2.如果Anchor对应的reference box与ground truth的IoU>0.7,标记为正样本。
事实上,采用第2个规则基本上可以找到足够的正样本,但是对于一些极端情况,例如所有的Anchor对应的reference box与groud truth的IoU不大于0.7, 可以采用第一种规则生成。负样本标定规则:如果Anchor对应的reference box与ground truth的IoU<0.3,标记为负样本。剩下的既不是正样本也不是负样本, 不用于最终训练。训练RPN的Loss是有classification loss (即softmax loss)和regression loss (即L1 loss)按一定比重组成的。 计算softmax loss需要的是anchors对应的groundtruth标定结果和预测结果,计算regression loss需要三组信息:
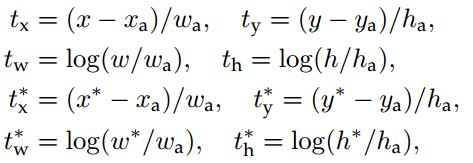
1.预测框,即RPN网络预测出的proposal的中心位置坐标x,y和宽高w,h;
2.锚点reference box:之前的9个锚点对应9个不同scale和aspect_ratio的reference boxes,每一个reference boxes都有一个中心点位置坐标x_a,y_a和宽高w_a,h_a。
3.ground truth:标定的框也对应一个中心点位置坐标xx,yx和宽高wx,hx。
因此计算regression loss和总Loss方式如下:
RPN训练设置:在训练RPN时,一个Mini-batch是由一幅图像中任意选取的256个proposal组成的,其中正负样本的比例为1:1。如果正样本不足128, 则多用一些负样本以满足有256个Proposal可以用于训练,反之亦然。训练RPN时,与VGG共有的层参数可以直接拷贝经ImageNet训练得到的模型中的参数; 剩下没有的层参数用标准差=0.01的高斯分布初始化。
三、RPN与Faster-R-CNN特征共享
RPN在提取得到proposals后,作者选择使用Fast-R-CNN实现最终目标的检测和识别。RPN和Fast-R-CNN共用了13个VGG的卷积层, 显然将这两个网络完全孤立训练不是明智的选择,作者采用交替训练阶段卷积层特征共享:
交替训练(Alternating training):
Step1:训练RPN;
Step2:用RPN提取得到的proposal训练Fast R-CNN;
Step3:用Faster R-CNN初始化RPN网络中共用的卷积层。迭代执行Step1,2,3,直到训练结束为止。
论文中采用的就是这种训练方式,注意:第一次迭代时,用ImageNet得到的模型初始化RPN和Fast-R-CNN中卷积层的参数;从第二次迭代开始,训练RPN时, 用Fast-R-CNN的共享卷积层参数初始化RPN中的共享卷积层参数,然后只Fine-tune不共享的卷积层和其他层的相应参数。训练Fast-RCNN时, 保持其与RPN共享的卷积层参数不变,只Fine-tune不共享的层对应的参数。这样就可以实现两个网络卷积层特征共享训练。 相应的网络模型请参考这里
四、深度挖掘
1.由于Selective Search提取得到的Proposal尺度不一,因此Fast-RCNN或SPP-Net生成的RoI也是尺度不一,最后分别用RoI Pooling Layer或SPP-Layer处理得到固定尺寸金字塔特征, 在这一过程中,回归最终proposal的坐标网络的权重事实上共享了整个FeatureMap,因此其训练的网络精度也会更高。但是,RPN方式提取的ROI由k个锚点生成, 具有k种不同分辨率,因此在训练过程中学习到了k种独立的回归方式。这种方式并没有共享整个FeatureMap,但其训练得到的网络精度也很高。这,我竟然无言以对。有什么问题,请找Anchors同学。
2.采用不同分辨率图像在一定程度可以提高准确率,但是也会导致训练速度下降。采用VGG16训练RPN虽然使得第13个卷积层特征尺寸至少缩小到原图尺寸的1/16(事实上,考虑到kernel_size作用,会更小一些), 然并卵,最终的检测和识别效果仍然好到令我无言以对。
3.三种scale(128x128,256x256,512x512),三种宽高比(1:2,1:1,2:1),虽然scale区间很大,总感觉这样会很奇怪,但最终结果依然表现的很出色。
4.训练时(例如600x1000的输入图像),如果reference box (即anchor box)的边界超过了图像边界,这样的anchors对训练Loss不产生影响, 即忽略掉这样的Loss.一幅600x1000的图经过VGG16大约为40x60,那么anchors的数量大约为40x60x9,约等于20000个anchor boxes. 去除掉与图像边界相交的anchor boxes后,剩下约6000个anchor boxes,这么多数量的anchor boxes之间会有很多重叠区域, 因此使用非极值抑制方法将IoU>0.7的区域全部合并,剩下2000个anchor boxes(同理,在最终检测端,可以设置规则将概率大于某阈值P且IoU大于某阈值T的预测框 (注意,和前面不同,不是anchor boxes)采用非极大抑制方法合并)。在每一个epoch训练过程中,随机从一幅图最终剩余的这些anchors采样256个anchor box作为一个Mini-batch训练RPN网络。
五、实验
1.PASCAL VOC 2007:使用ZF-Net训练RPN和Fast-R-CNN,那么SelectiveSearch+Fast-R-CNN, EdgeBox+Fast-R-CNN, RPN+Fast-R-CNN的准确率分别为:58.7%,58.6%,59.9%. SeletiveSeach和EdgeBox方法提取2000个proposal,RPN最多提取300个proposal, 因此卷积特征共享方式提取特征的RPN显然在效率是更具有优势。
2.采用VGG以特征不共享方式和特征共享方式训练RPN+Fast-R-CNN,可以分别得到68.5%和69.9%的准确率(VOC2007)。此外,采用VGG训练RCNN时, 需要花320ms提取2000个proposal,加入SVD优化后需要223ms,而Faster-RCNN整个前向过程(包括RPN+Fast-R-CNN)总共只要198ms.
3.Anchors的scales和aspect_ratio的数量虽然不会对结果产生明显影响,但是为了算法稳定性,建议两个参数都设置为合适的数值。
4.当Selective Search和EdgeBox提取的proposal数目由2000减少到300时,Faste-R-CNN的Recall vs. IoU overlap ratio图中recall值会明显下降; 但RPN提取的proposal数目由2000减少到300时,Recall vs. IoU overlap ratio图中recall值会比较稳定。
六、总结
特征共享方式训练RPN+Fast-R-CNN能够实现极佳的检测效果,特征共享训练实现了买一送一,RPN在提取Proposal时不仅没有时间成本,还提高了proposal质量。 因此Faster-R-CNN中交替训练RPN+Fast-R-CNN方式比原来的SlectiveSeach+Fast-R-CNN更上一层楼。
我创建了一个机器学习方面的交流群,目的是交流机器学习的前景应用、日常code过程中的收获和学习生活中的困难。QQ群号:701451028
谢谢观看,希望对您有所帮助,欢迎指正错误,欢迎一起讨论!!!

感谢您的支持,我会继续努力的!


打开微信扫一扫,即可进行扫码打赏哦